quadrocopter
Infected by the other members of the Toolbox e.V, especially Thomas I started to search for parts for a quad copter which could be used to race and do some freestyle moves.
Since for me also the assembly is new and I had the feeling that this quad will also be likely to be damaged I wanted to build it with separate components. Also its more fun that way.
Since I did not want to have a huge quad I wanted to hit the 250g Law limit for the assembly. In such a case I would not even be forces to add a burn resistant name tag to the quad, which I would anyway recommend if it could be lost.
After some search i found the Diatone quad frame GT M3 pretty appealing since they have a aluminum cage for the PCB stack and a 3mm carbon plate which is robust enough for a beginner.

The following motors where selected by taking the recommendations of the frame into account: motorsize 1408 motorr 4000KV
The motor size of brush less motors for quad copters are regularly indicated by a 4-digit number The first two digits represent the stator width or diameter while the second ones represent the hight. The values types are in mm
In general the motor size have quite a influence of the flight characteristics. A taller motor most likely result in more power at the upper Throttle/RPM and a wider motor would result in a higher torque at low throttle.
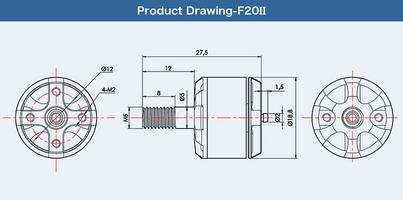
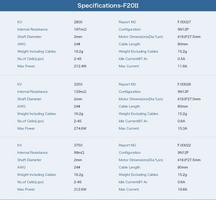
Since I wanted to use motors with a actual data sheet or at least a test measurement how much thrust and amps would be drawn with certain types of propeller I did take a look at the T-Motor F20II F20 II 1408 3750KV
The where the ones which had a lot of thrust with 532g when they are mounted with 3040 propeller types. The goal of the quad would be to be below 250g so the thrust to weight ratio would be 1:8 for a quad copter.


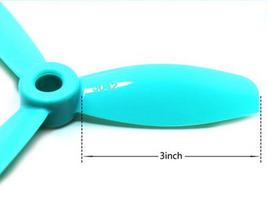
At this point the Motors and Frame where clear. The next step was to choose a propeller type. For this I selected the three bladed one with close to the 3040 size. The only ones which are quite near to this are the Geprc 3042 The Number of the Propellers are also representing the size nearly as the motor identification number. The first two digits are the diameter in inch and the second two ones are representing the pitch of the propeller.
The Pitch is sometimes misunderstood. There are 2 value types of the propeller blade. The actual meaning of it is the forward movement of he propeller if it's rotating 360 degrees. This value is calculated in inch. So if the upper propeller would be measured this schema the 3042 would represent the diameter as 3 inch and the propeller is moving 4.2 inches forward.
However there exists also the measurement of the angular pitch. This value is common for props which have a non constant angle in order to compare them more easily. The conversion from one to the other is pretty simple and can be found the in formula below.
You can imagine the higher the pitch is the more air is moved and the more thrust it should generate with the same rpm. Side effect of the higher pitch is a higher amp drawn thought. So you have to be carefully which props you putting on the motor otherwise you could overload the motor and they could burn down or the ESC can not handle that much amps.
In my case they are measured in degree so the forward pitch angle of \(42°\) would result in a pitch blade of 5.09 inches.


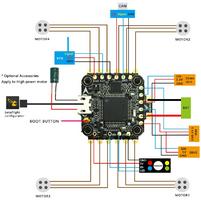
Now we have the motors and propeller selection finished and estimate the amp drawn through the ESC. In my case this is 19.8A per motor or 312.64W. The values of the ESC are also declared typical for each motor. Also the ESC has to work together with the flight controller. Since beta flight already announced that an F3 chip is getting short on the flash I wanted a F4 board. The f7 boards would also work but I did not see the benefit compared to the nearly double cost of a FC. In the end I selected an HGLRC 20x20mm Micro F4 Flight Controller with an 28A Blhel_S BB2 2-4S 4 in 1 ESC
Last but essential components are the video transmitter equipment. There are 2 aspect ratio available 4:3 and 16:9. The choice is just based on preferences since you can also change the lens on the micro cameras and with it the field of view.
I personally like 16:9 since its a more natural view for the eye. Therefor I selected a runcam Sparrow WDR 700TVL As you can image the video is not even close to hd or even hd ready. The video is transmitted analog like the old analog satellite tv with round about 576i@25fps for PAL and 480i@29.97fps for NTSC. This is the case since the video shall be with minimal to no delay transmitted, which is not typical for digital video signals. Therefore these quads are using typical analog video.

For sending the captured video signal I chose a TBS Unify Pro HV Race FPV Video Sender SMA - Team Blacksheep since this does less interference on other channels which Is required if you flying together with your friends. With the china VTX there is a high chance that they have interference if he quad gets powered on.
Lastly I also added a beeper and LED's since otherwise it might be hard to find after a crash in high grass.

part list: